
mBot2 – první seznámení
Společnost Makeblock uvádí na trh druhou generaci robotické hračky mBot, která je poměrně populární i u nás. Jednou z hlavních inovací je náhrada mikrokontroléru ATmega328 mikropočítačem CyberPi.
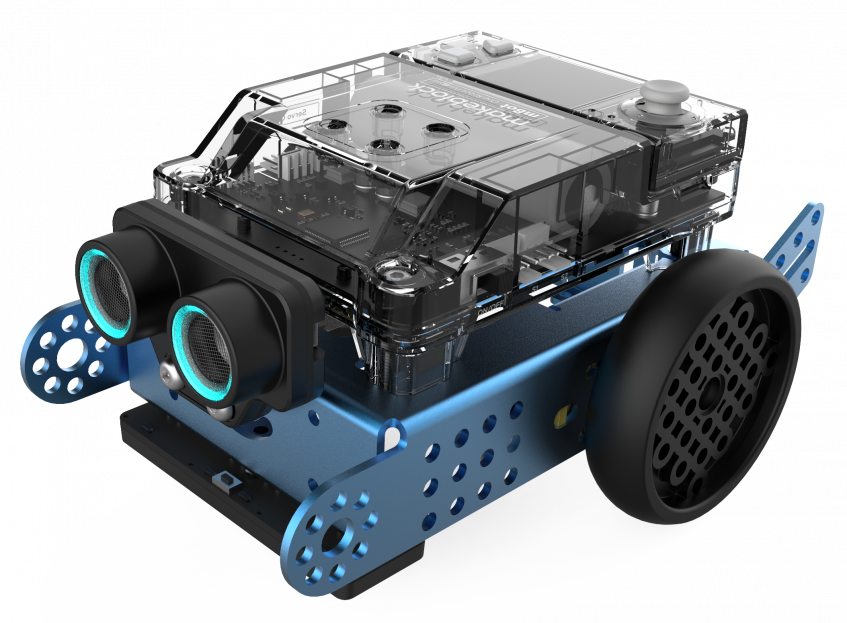
Robotická hračka mBot není v našich končinách neznámá – díky příznivé ceně, robustní konstrukci a možnosti intuitivního programování v prostředí Scratch je oblíbena v zájmových kroužcích napříč celou Českou republikou. Nyní přichází na trh její druhá generace – mBot2. V úvodní recenzi se zaměříme na rozdíly mezi generacemi, nastavení a otestování funkčnosti hračky.
Rozbalení a sestavení
mBot2 je dodáván ve víceméně totožné krabici, jako jeho starší sourozenec. Už po rozbalení je ale patrná změna – zatímco srdcem první generace mBota byl jeden řidící modul zvaný mCore, osazený mikrokontrolérem ATmega328, mBot2 má řidící moduly hned dva: mikropočítač CyberPi a mBot2 Shield, který se stará o řízení motorů, napájení pro CyberPi a poskytuje rozhraní pro celou řadu senzorů. Kromě těchto modulů je součástí základního balení také designově vylepšení ultrazvukový senzor vzdálenosti a značně inovovaný RGB senzor, které můžeme použít např. pro úlohy typu sledování dráhy. Mechanická část je víceméně tototožná s předchozí verzí, stejně jako zbytek balení – sada šroubů různých velikostí, propojovací kabely, USB kabel, šroubovák a návod včetně skládací papírové dráhy, na které lze využít RGB senzor. Oproti starší verzi chybí infračervený ovladač, kterým šlo mBota ovládat a místo něj je přibalen USB Bluetooth stick, který umožní bezdrátové spojení s mBot2 i z počítače, který Bluetooth rozhraním nedisponuje.
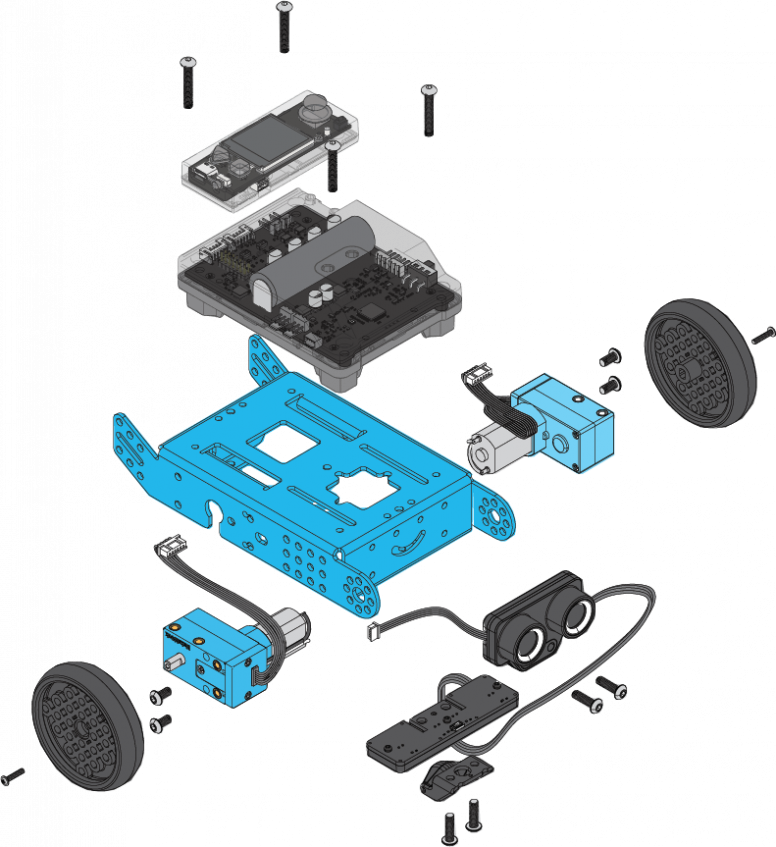
Sestavit mBota2 podle návodu zabere při troše šikovnosti maximálně 20 minut. Sestavení je o trochu jednodušší než u předchozí verze, mBot2 shield není na distančních sloupcích a celkově hračka působí robustněji. Je dobré si dát pozor na to, že dva základní senzory, ultrazvukový měřič vzdálenosti a RGB senzor, jsou propojeny mezi sebou (sériově). Celkem bych ocenil, pokud by (třeba v budoucnu) výrobce označil igelitové pytlíčky se šroubky – dají se sice relativně snadno identifikovat, ale umím si představit, že pro někoho může hledání správného šroubku i zdržet.
První zapnutí
Jak už víme, srdcem novinky je mikropočítač CyberPi. Pro seznámení s jeho možnostmi se můžete začíst třeba v seriálu Seznamujeme se s CyberPi. Je trochu škoda, že CyberPi, které se dodává s novým mBotem nemá naprogramován program, který by uměl robota ovládat. Pro ověření funkce je proto třeba mBota připojit k počítači a naprogramovat, např. v prostředí mBlock (podrobnosti ve zmíněném seriálu o programování CyberPi).
Pro první seznámení s funkcemi výborně poslouží Scratch, do kterého je třeba doinstalovat potřebnou podporu pro nové bloky. Pro instalaci podpory je třeba provést následující kroky:
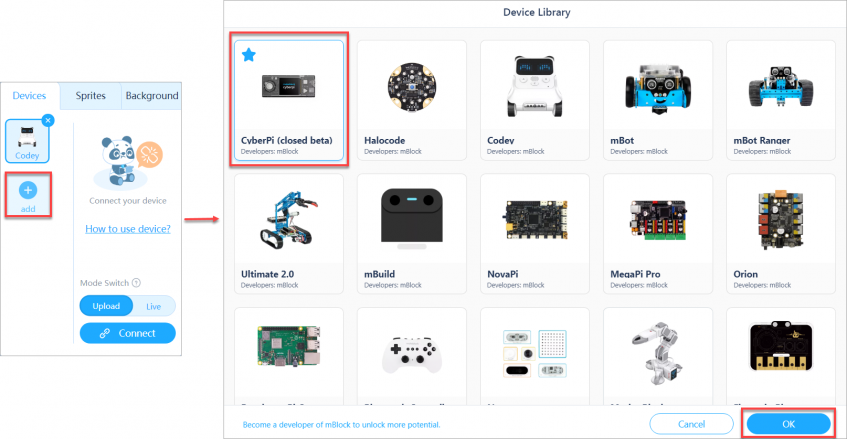
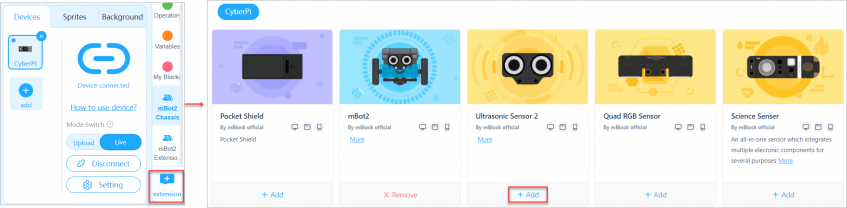
1. kliknutím na tlačítko Přidat (Add) vybrat z nabídky CyberPi (pozor na to, že na rozdíl od starších verzí mBot a mBot Ranger již nemá mBot2 vlastní položku v knihovně zařízení)
2. po kliknutí na tlačítko Rozšíření (Extension) přidat mBot2, v seznamu bloků se objeví dvě nové položky – mBot2 Chassis a mBot2 Extension.
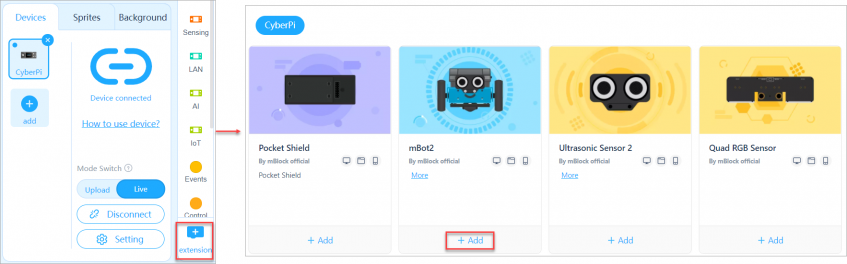
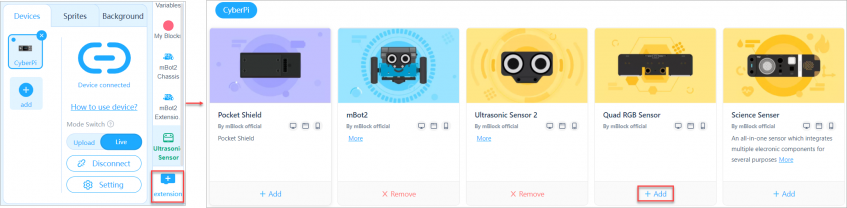
3. po kliknutí na tlačítko Rozšíření (Extension) přidat Ultrasonic Sensor 2
4. po kliknutí na tlačítko Rozšíření (Extension) přidat Quad RGB Sensor
Pokud máme nainstalováno vše potřebné, můžeme připojit mBota k počítači a vyzkoušet, jak funguje. Pro první připojení rozhodně doporučuji využít USB kabel. Volbou režimu živě lze v reálném čase s robotem komunikovat. Bloky pro ovládání motorů jsou v sekci mBot2 chassis.
Vylepšení oproti první generaci
Při evoluci lze očekávat vylepšení, ale v případě mBota lze bez nadsázky hovořit téměř o revoluci 🙂 Jaké jsou hlavní změny?
Řidící jednotka
Změna řidící jednotky z mCore na CyberPi nepřinesla jen změnu procesoru – přinesla hlavně změnu filozofie celého ekosystému (očekávám, že CyberPi se stane základem dalších produktů Makeblock) a ohromné rozšíření konektivity. Procesor ESP32-WROVER-B běží na 240MHz, uživatel (programátor) má k dispozici 520kB SRAM, 8MB FLASH RAM a 8MB PSRAM. Vedle těchto parametrů vypadá původní mCore s 20MHz a 2kB SRAM jako velmi chudý příbuzný. Kromě interpreteru microPythonu lze určitě zmínit řadu on-board senzorů (senzor světla, akcelerometr, gyro a mikrofon), vlastní displej, reproduktor a řadu RGB LED. CyberPi je připojen k Shieldu, který zajišťuje napájení (baterie s kapacitou 2500 mAh) a rozhraní k dalším periferiím. Kromě motorů s enkodérem, které jsou hlavní pohonnou jednotkou mBot2, je možné připojit další DC motory nebo serva.
Pohon
Také pohon robota zaznamenal velký posun. Díky použití optických enkodérů přibyla možnost otočit motor o určitý úhel s přesností lepší než 5 stupňů a zlepšil se také rozsah možných otáček na 1 – 200 otáček za minutu (z 47 – 118 u první generace). Rozhodně lze také ocenit zařazení kovových dílů.
Senzory
Hlavní senzory, ultrazvukový měřič vzdálenosti a RGB senzor, doznaly kromě vylepšeného designu také dílčí technologické změny. U RGB senzoru byl navýšen počet detektorů pro sledování čáry za dvou na čtyři a také další nově přidané detektory (čtyři senzory barvy a čtyři senzory světla) mohou sloužit jako detektory vodící čáry. Nově je také přidána možnost kalibrace na okolní světlo, čímž lze významně zlepšit účinnost všech detektorů. Ultrazvukový senzor je celkově robustnější, obsahuje dedikovaný čip pro zlepšení stability detekce. Novinkou je také zařazení modré LED, díky které může celý modul svítít.
Závěr
Už na první pohled se evoluce mBota zdařila. Využití mikropočítače CyberPi dává hračce zcela jiné možnosti než původní mCore. V příštích dílech se podíváme na skutečné možnosti a výkon robota a vyzkoušíme i super cool novinku – chytrou kameru, která má potenciál posunout možnosti mBota do úplně jiné dimenze.





Jeden komentář